Introduction
Abstract
Our original end goal was to create a robot with an arm that can locate and retrieve a specific object from among a selection of a few different objects. Each object is labeled with a different AR-tag and the user will be able to tell the robot which AR-tag’s object to retrieve.
Project Description
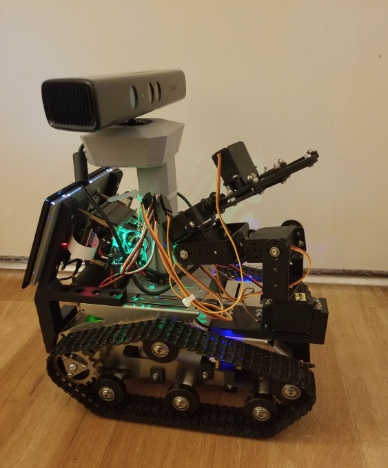
Our robot uses a camera to read each object’s AR-tag, decide which object the user has asked for and then retrieve it. It is able see and recognize different AR-tags, accurately locate the desired tag and go to the object associated with the tag. Then, using its arm our robot attempts to pick up the object. Our project is interesting because it utilizes computer vision and controls to have the robot locate a desired object and accurately navigate to it. Our robot incorporates sensing through the use of a Kinect camera to see the objects and AR-tags, it incorporates planning by selecting a sequence of movements that navigates the robot to its target, and it incorporates actuation through the use of the robot arm for grabbing the target object and wheels for moving the robot to the target object. Because we built our own robot and hardware from scratch, we had to make our own controls for the motors so that the robot would be able to navigate itself precisely. We also had to figure out how to connect and calibrate our own kinect camera and have the robot react appropriately according to what the camera sees.
Real-World Applications
Our project was created with the idea of making a robot that can help someone retrieve objects from around their home. There are many people, such as those with disabilities, who have difficulty getting around the house and a robot that could go and retrieve some desired object for the person could help make their lives easier.