Additional Materials
Script to Use Motor Controller and AR Tracker (RoverGoSmooth.py)
import tf2_ros
import rospy
import numpy as np
import sys
import os
import RPi.GPIO as GPIO
import PiMotor
import time
import grabBlock as grabber
GPIO.setup(8, GPIO.IN)
GPIO.setup(10, GPIO.IN)
class RoverGo:
def __init__(self):
# self.pose = Pose()
rospy.init_node('tf_listener', anonymous=True)
self.rover_frame = "camera_link"
self.goal_frame = None
self.tfBuffer = tf2_ros.Buffer()
self.tfListener= tf2_ros.TransformListener(self.tfBuffer)
self.rate = rospy.Rate(10)
self.left_motor = PiMotor.Motor("MOTOR1",1)
self.right_motor = PiMotor.Motor("MOTOR2",1)
self.distance_tolerance = 0.5
self.angle_tolerance = 0.25
self.goalReached = False
def dist(self, goalT):
return np.sqrt(goalT.x * goalT.x + goalT.y * goalT.y)
def angle(self, goalT):
return np.arctan(goalT.y / goalT.x)
def currTrans(self):
trans = self.tfBuffer.lookup_transform(self.rover_frame, self.goal_frame, rospy.Time(0)).transform
#print("Distance:", self.dist(trans.translation), "Angle:", self.angle(trans.translation))
#print(trans.translation)
return trans
def photo_left(self):
return GPIO.input(10)
def photo_right(self):
return GPIO.input(8)
def leftForward(self, val):
#return
self.left_motor.forward(val)
def rightForward(self, val):
#return
self.right_motor.forward(val)
def leftReverse(self, val):
#return
self.left_motor.reverse(val)
def rightReverse(self, val):
#return
self.right_motor.reverse(val)
def stopMotors(self):
self.left_motor.stop()
self.right_motor.stop()
def drive(self, goalT, error_func, tolerance, left_motor_func, right_motor_func, delta_input=5, max_ticks=35):
encoderTolerance = 3
photo_total_right = 0
photo_total_left = 0
photo_right_prev = self.photo_right()
photo_left_prev = self.photo_left()
right_input = 100
left_input = 70
start_time = rospy.get_time()
while goalT is None or abs(error_func(goalT)) > tolerance:
photo_right_current = self.photo_right()
photo_left_current = self.photo_left()
if (photo_right_current != photo_right_prev):
photo_total_right += 1
if (photo_left_current != photo_left_prev):
photo_total_left += 1
photo_right_prev = photo_right_current
photo_left_prev = photo_left_current
if max(photo_total_left, photo_total_right) > max_ticks:
break
delta = photo_total_left - photo_total_right
if (abs(delta) > encoderTolerance):
right_input += delta
if right_input > 100:
right_input = 100
elif right_input < 0:
right_input = 0
left_motor_func(left_input)
right_motor_func(right_input)
try:
goalT = self.currTrans().translation
except (tf2_ros.LookupException, tf2_ros.ConnectivityException, tf2_ros.ExtrapolationException):
goalT = None
self.stopMotors()
rospy.sleep(3)
#print("Right photo interruptor: " + str(photo_total_right))
#print("Left photo interruptor: " + str(photo_total_left))
def driveStraight(self, goalT):
print("Driving straight...")
self.drive(goalT, self.dist, self.distance_tolerance, self.leftForward, self.rightForward)
def turnLeft(self, goalT):
print("Turning left...")
self.drive(goalT, self.angle, self.angle_tolerance, self.leftReverse, self.rightForward, max_ticks=5)
def turnRight(self, goalT):
print("Turning right...")
self.drive(goalT, self.angle, self.angle_tolerance, self.leftForward, self.rightReverse, max_ticks=5)
def goToTag(self, goal_frame):
trans = None
prevTrans = None
self.goal_frame = goal_frame
while not rospy.is_shutdown() and not self.goalReached:
try:
if trans is not None:
prevTrans = trans
trans = self.currTrans()
goalTranslation = trans.translation
if self.dist(goalTranslation) <= self.distance_tolerance and self.angle(goalTranslation) <= self.angle_tolerance:
self.goalReached = True
if not self.goalReached:
currAngle = self.angle(goalTranslation)
if np.abs(currAngle) >= self.angle_tolerance:
if currAngle < 0:
self.turnRight(goalTranslation)
else:
self.turnLeft(goalTranslation)
elif self.dist(goalTranslation) >= self.distance_tolerance:
self.driveStraight(goalTranslation)
except (tf2_ros.LookupException, tf2_ros.ConnectivityException, tf2_ros.ExtrapolationException):
print("Tag not detected. Searching...")
if prevTrans is not None:
prevAngle = self.angle(prevTrans.translation)
if prevAngle > 0:
self.turnLeft(None)
else:
self.turnRight(None)
else:
self.turnRight(None)
rospy.sleep(5)
self.stopMotors()
print("We made it folks")
grabber.grab()
if __name__ == '__main__':
r = RoverGo()
numS = input("Which tag would you like? ")
tag = 'ar_marker_' + str(numS)
r.goToTag(tag)
Our Code
The rest of our code can be found on our GitHub.
Some software resources that we used:
- ROS Kinetic
- Freenect_Stack
- Libfreenect
- AR_Track_Alvar
- RGBD__Launch
Hardware Data Sheets
- Raspberry pi 3 B+
- 7 “ Raspberry Pi Touchscreen
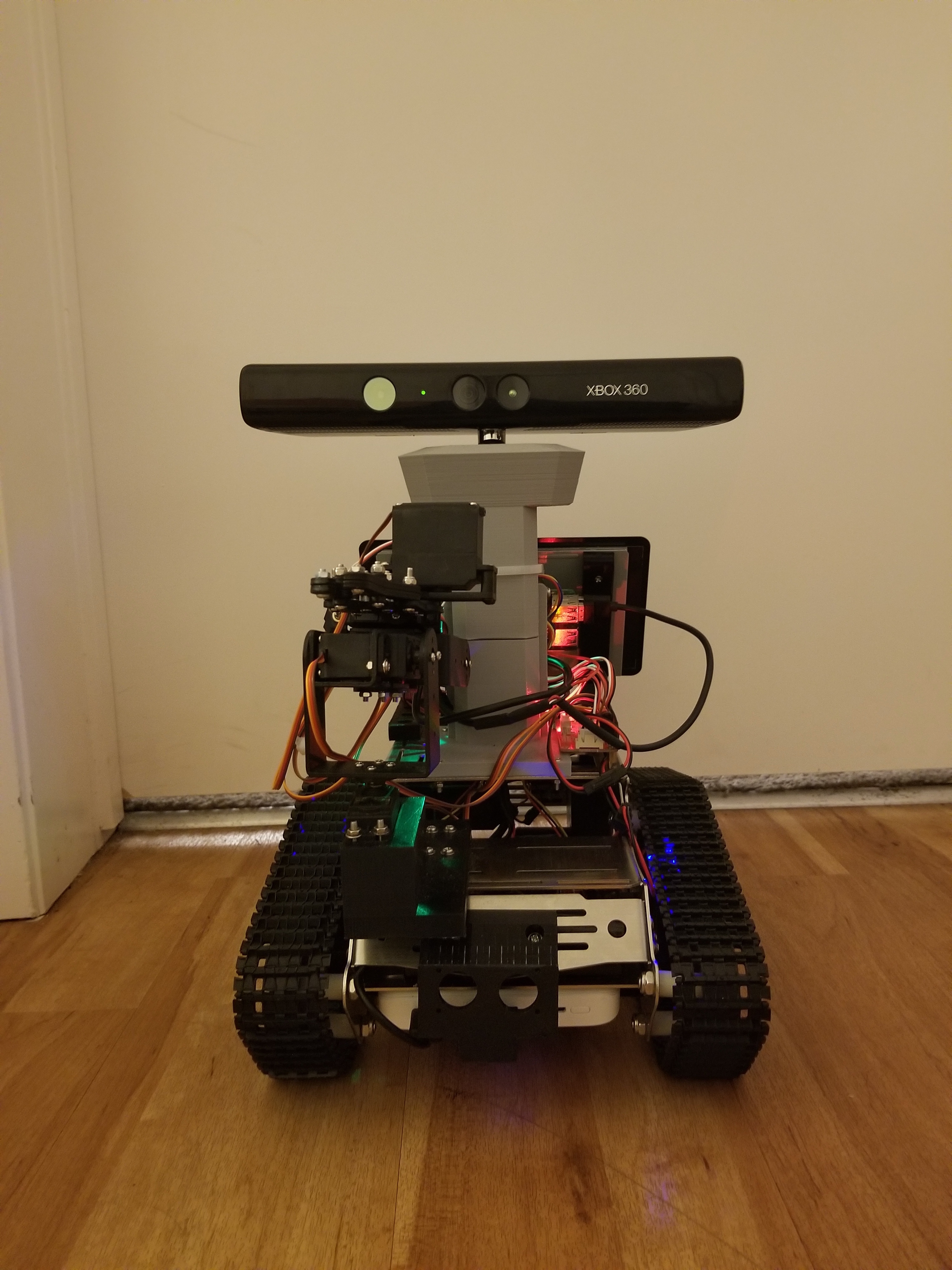
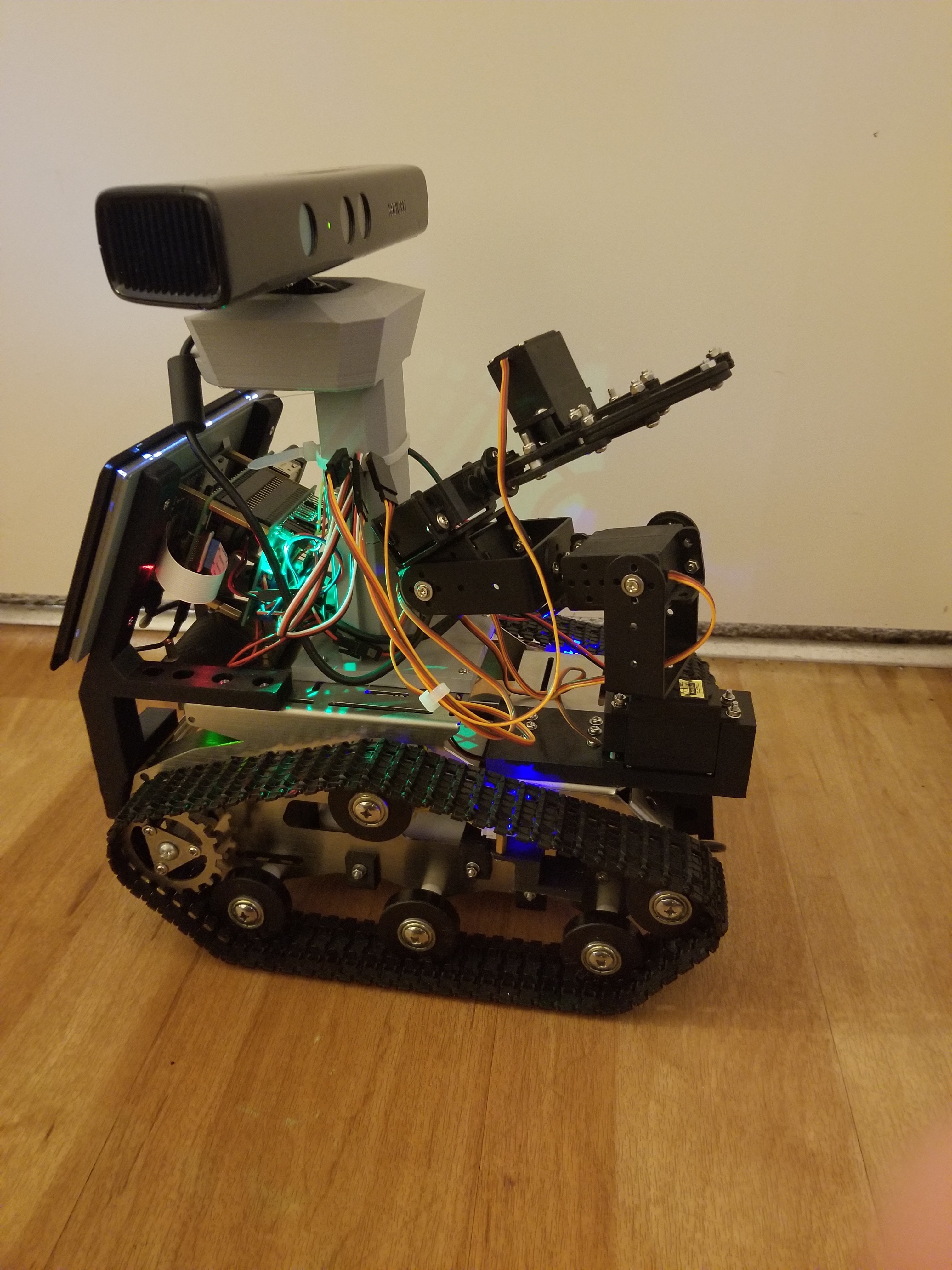
- Xbox 360 Kinect
- PCA 9685 16 channel Servo Controller
- SB Components Motor Shield
- Mg966r 4.8V-7.2V Servo Motor
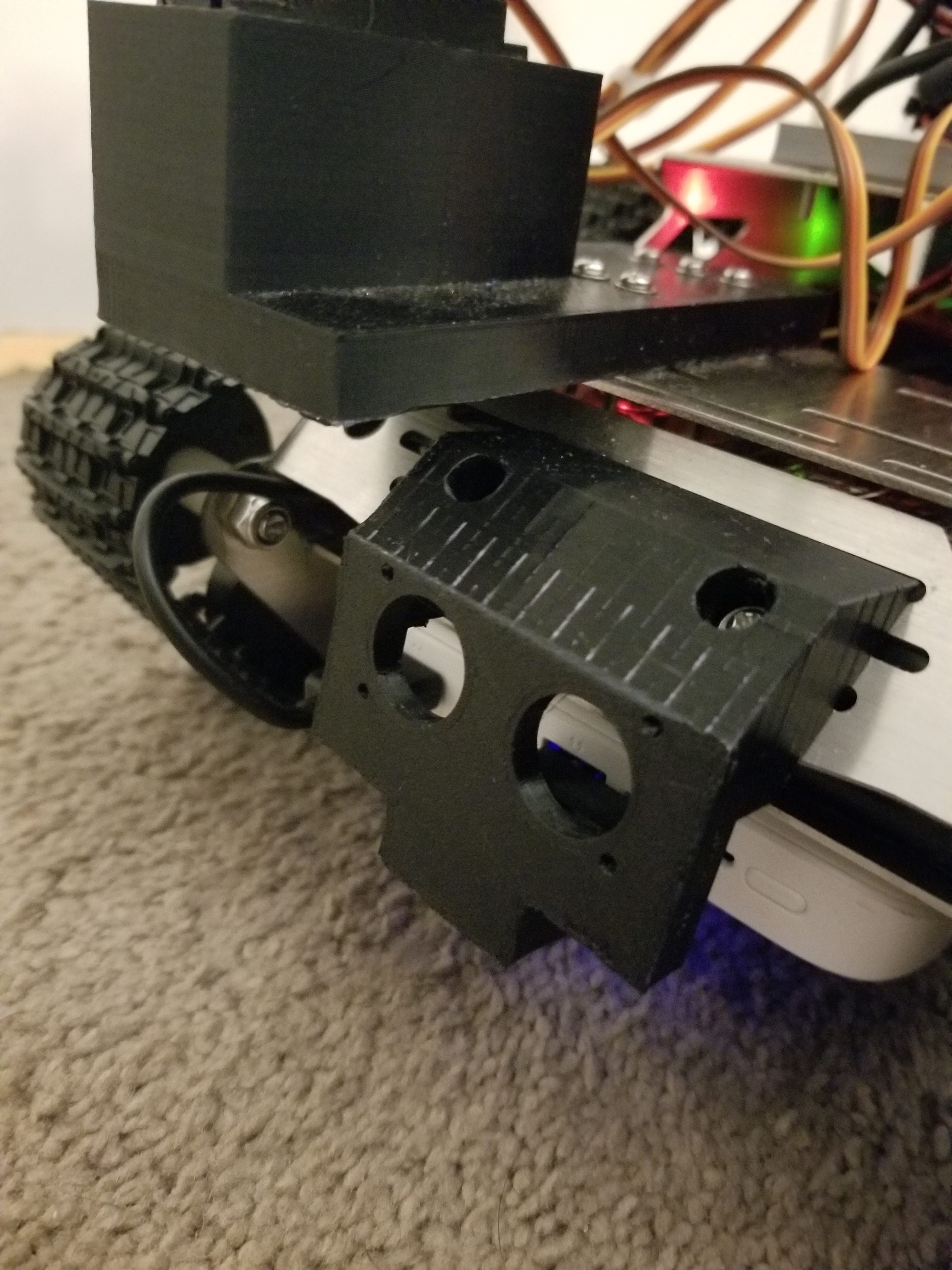
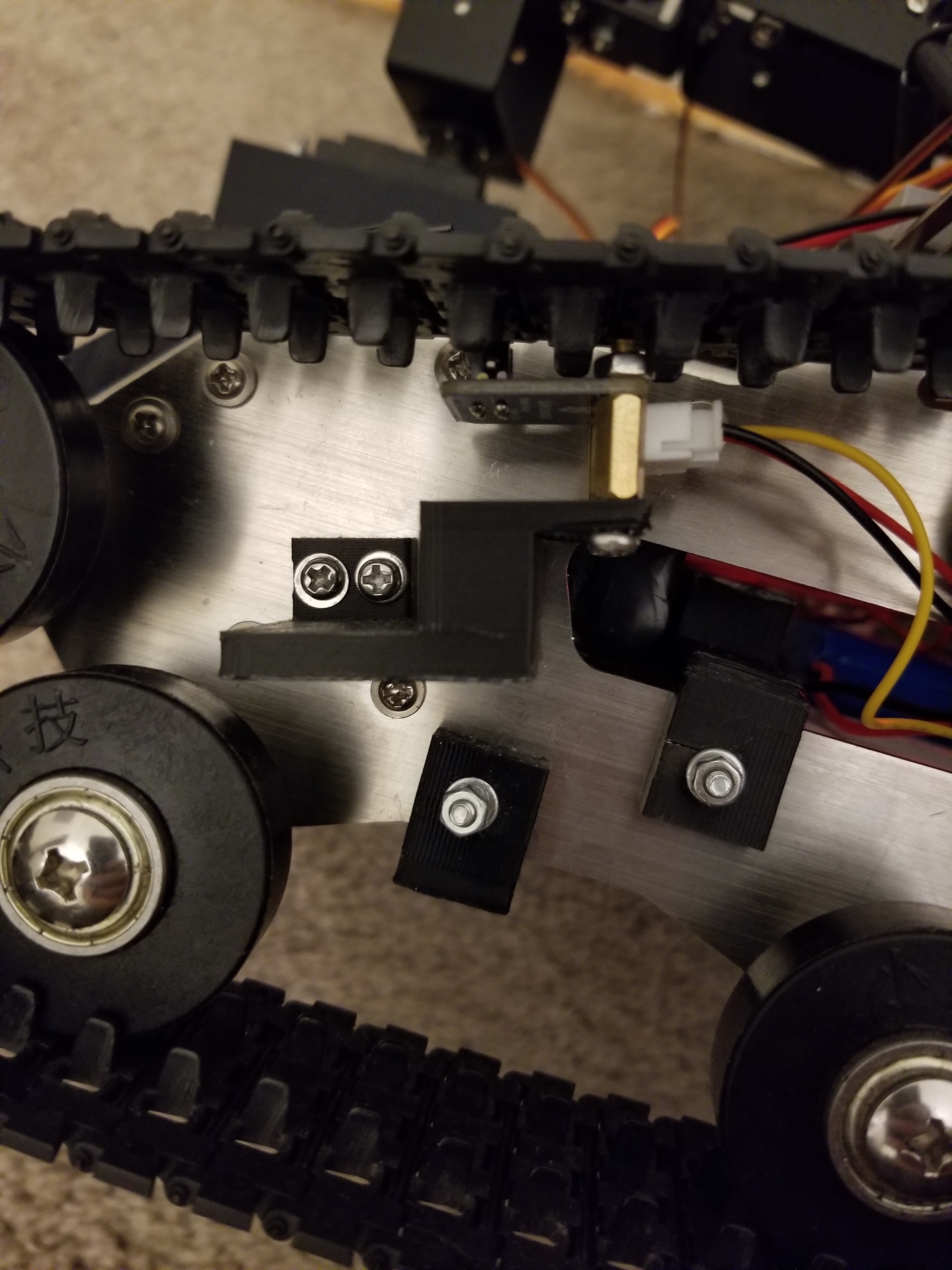
- SunFounder Photo-interrupter Sensor Module
Video
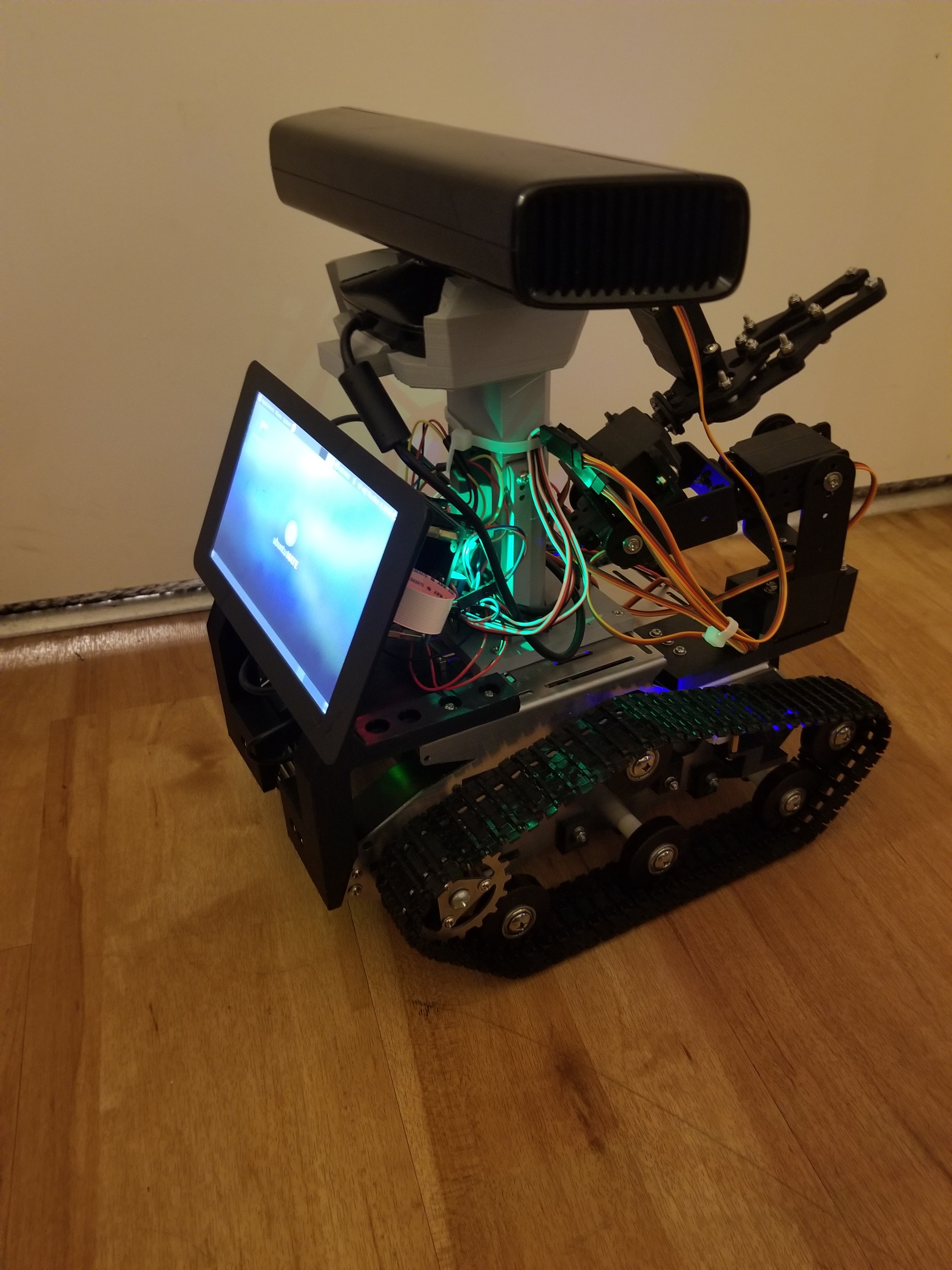
Pictures